Blindmaps aids the blind and visually impaired to navigate independently in urban areas


Those with full eyesight take for granted how straightforward it feels to walk in an urban environment. Navigation becomes infinitely more complex when sight is no longer a reliable way to process the surroundings. Blindmaps.org is a research-project around this question: how can the visually impaired be given the freedom of exploring and navigating in an unknown urban context.
Our approach
We are proposing an open & modular hardware/software ecosystem to tailor for the wide range of navigational challenges and use-cases that the visually impaired may experience while independently exploring unfamiliar places.
This is done by focusing on tangible interface solutions for the blind and visually impaired to connect and interact with the city environment using the smartphone’s capabilities for a wide range of navigational needs. In parallel we want to kickstart an open discussion about the city infrastructure of tomorrow to have a realistic chance that our interface can act unrestricted within that.

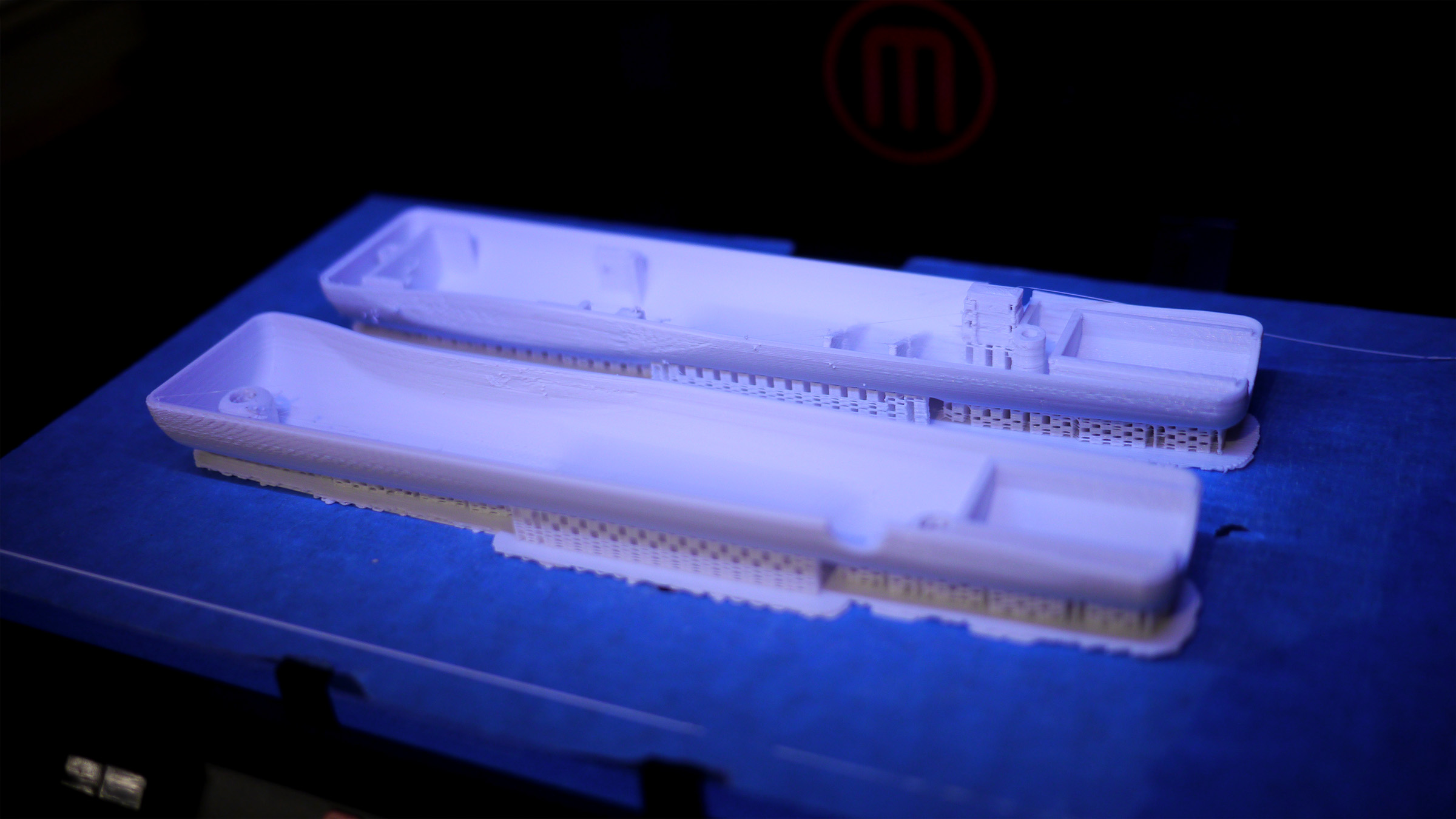
Prototypes
Using mostly open hardware/software, we are building a series of simple & low-cost prototypes of Bluetooth-enabled haptic interfaces integrated in a white cane‘s grip with the user’s phone and iBeacons around the city’s infrastructure.
These prototypes can be connected to smartphones and beacons using Bluetooth Low Energy (such as iBeacon) and can be rebuilt, improved and be modified by Makers around the globe.
How did it all start?
The initial concept was made in January 2012 at the Copenhagen Institute of Interaction Design as part of an 36h investigation. The original Blindmaps concept proposed a way for the visually impaired to navigate and explore new routes with ease. The user searches for a route using voice-input. Using tactile-sensitive haptic technology, the interface has a perforated braille-like screen with pins that move and adapt to show how to navigate the route in real-time.
After this, we continued to project and built non-functional prototypes to test with users. We learned a lot from this process and realised that white cane users are asking for a solution that seamlessly integrates into the grip of their white cane and that the moving pins are not only a very convoluted interface to feel but also hugely challenging to build. So we decided to not focus on a futuristic solution, which only could be realised after many years of work and millions spent, but instead switch over to a low-cost and iterative process where we use existing off-the-shelf technology. With this approach, it is a more realistic project that can be developed and released as affordable and working products in the near future and be used by the blind and visually impaired around the globe.

Together with
Collaboration: Markus Schmeiduch
Contributors:
Ilkka Pirttimaa Integration support into BlindSquare app
Silja Korn User-Testing
Gerhard Hojas User-Testing
Martin Marchstein User-Testing
Michael Platz User-Testing
Georg Molzer User-Testing
Claudia Schnugg Ars Futurelab Residency Coordination







Explore similar projects








